This post is part of my Game Math Series.
It occurred to me that the entire time I’ve been working with quaternions, I have never read or learned about the derivation of the formula for slerp, spherical linear interpolation. I just learned the final formula and have been using it.
Upon a preliminary search I couldn’t seem to immediately find a straightforward derivation, either (at least not one that fits in the context of game development). So I thought it might be a fun exercise to derive it myself.
As it turns out, it is indeed fun and could probably serve as an interesting trigonometry & vector quiz question!
A quick recap: slerp is an operation that interpolates between two vectors along the shortest arc (in any dimension higher than 1D). It takes as input the two vectors to interpolate between plus an interpolation parameter:
![\[ Slerp(\overrightarrow{a}, \overrightarrow{b}, t) = \frac{sin((1-t)\Omega)}{sin\Omega} \overrightarrow{a} + \frac{sin(t\Omega)}{sin\Omega} \overrightarrow{b}, \]](http://allenchou.net/wp-content/ql-cache/quicklatex.com-838c4e593e55b17a77dcd748567fb659_l3.png "Rendered by QuickLaTeX.com")
where  is the angle between the two vectors:
is the angle between the two vectors:
![\[ \Omega = \frac{cos^{-1}(\overrightarrow{a} \cdot \overrightarrow{b})}{||\overrightarrow{a}|| \, ||\overrightarrow{b}||} \]](http://allenchou.net/wp-content/ql-cache/quicklatex.com-248904bb5f68842746e18920e2851064_l3.png "Rendered by QuickLaTeX.com")
If the interpolation parameter  changes at a constant rate, the angular velocity of the slerp result is also constant. If is set to
changes at a constant rate, the angular velocity of the slerp result is also constant. If is set to  , it means the slerp result is “the 25% waypoint on the arc from
, it means the slerp result is “the 25% waypoint on the arc from  to
to  : the angle between and the slerp result is
: the angle between and the slerp result is  , and the angle between and the slerp result is
, and the angle between and the slerp result is  .
.
In the context of game development, slerp is typically used to interpolate between orientations represented by quaternions, which can be expressed as 4D vectors. In this case the shortest arc slerp interpolates across lies on a 4D hypersphere.
As mentioned before, this formula can be used on any vectors in any dimension higher than 1D. So it can also be used to interpolate between two 3D vectors along a sphere, or between two 2D vectors along a circle.
In the context of game development, we almost exclusively work with unit quaternions. So in my derivation, I make the assumption that the vectors we are working with are all unit vectors. The flow of the derivation should be pretty much the same even if the vectors are not unit vectors.
Without further ado, here’s the derivation.
The Derivation
Let  be the results of slerp:
be the results of slerp:
![\[ \overrightarrow{c} = Slerp(\overrightarrow{a}, \overrightarrow{b}, t) \]](http://allenchou.net/wp-content/ql-cache/quicklatex.com-181820cbc931879fa737bdb8c9c9ea38_l3.png "Rendered by QuickLaTeX.com")
And let be the angle between and .
Knowing that the angle between and is  , and the angle between and is
, and the angle between and is  , we can come up with this figure:
, we can come up with this figure:
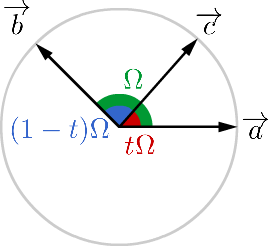
Here’s the strategy. We build a pair of orthogonal axes  and
and  from and . Then, we use the parametric circle formula to find :
from and . Then, we use the parametric circle formula to find :
![\[ \overrightarrow{c} = cos(t\Omega) \hat{x} + sin(t\Omega) \hat{y} \]](http://allenchou.net/wp-content/ql-cache/quicklatex.com-b565654e80ddc81d9b8570dc5d9f8159_l3.png "Rendered by QuickLaTeX.com")
Since is already a unit vector that convenient lies on the horizontal axis in the figure, let’s just pick  . So then can be found by taking away the component in that is parallel to and normalizing the remainder:
. So then can be found by taking away the component in that is parallel to and normalizing the remainder:

Now plug and back into the parametric circle formula:

And voila! We have our slerp formula.
Edit: Eric Lengyel has pointed out there’s another way to derive the slerp formula using similar triangles, presented in his Mathematics for 3D Game Programming and Computer Graphics, 3rd ed., Section 4.6.3.
