This post is part of my Game Physics Series.
Dynamic AABB tree is a type of broadphase that is borderless, meaning that it does not impose a strict border limit as some other broadphases do, such as explicit grid and implicit grid.
It is very efficient in all aspects in terms of game physics, including ray casting, point picking, region query, and, most importantly, generating a list of collider pairs that are potentially colliding (which is the main purpose of having a broadphase).
In this post, I will explain how a dynamic AABB tree works and show you a sample implementation.
The Structure
First, let’s look at the basic concept of a dynamic AABB tree. From its name, you can already guess that it has something to to with storing AABB-related information in a tree structure, and it is dynamic at run time.
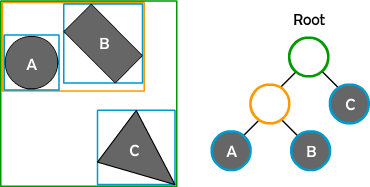
Each collider has its own AABB, and they are stored inside a binary tree as leaf nodes. Each internal node, a.k.a. branch node, holds its own AABB data that represents the union of the AABB of both of its children.
Visual aids are always better than plain text. The picture below shows a spatial configurations of several colliders and a visual representation of a possible corresponding tree structure.

![\[ -\frac{\beta}{\Delta t} \cdot d, \]](https://allenchou.net/wp-content/ql-cache/quicklatex.com-9845be1fb97bb07e87203d0d5f7f8d0a_l3.png "Rendered by QuickLaTeX.com")
 is the penetration depth.
is the penetration depth. , where
, where  is the Jacobian matrix,
is the Jacobian matrix,  is the velocity vector, and
is the velocity vector, and  is the bias term.
is the bias term.  , and then differentiate it with respect to time to obtain the velocity constraint
, and then differentiate it with respect to time to obtain the velocity constraint  . Sometimes, it is more intuitive to directly derive the velocity constraint itself, and I think it is the case for contact constraints. However, for the purpose of demonstration, I will first find the equation for the position constraint, and then derive the velocity constraint.
. Sometimes, it is more intuitive to directly derive the velocity constraint itself, and I think it is the case for contact constraints. However, for the purpose of demonstration, I will first find the equation for the position constraint, and then derive the velocity constraint.
 , where
, where  and
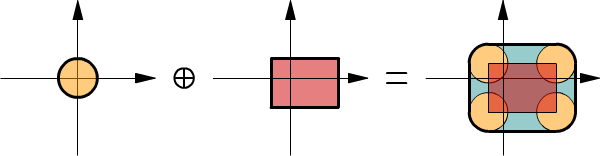
and  be two shapes (2D or 3D), the Minkowski Sum of
be two shapes (2D or 3D), the Minkowski Sum of  , is a shape resulted from “sweeping”
, is a shape resulted from “sweeping” ![\[ A \oplus B = \{ P_A + P_B \, | \, P_A \in A, P_B \in B \} \]](https://allenchou.net/wp-content/ql-cache/quicklatex.com-42481ad16a3b19f24643e057cf4434f6_l3.png "Rendered by QuickLaTeX.com")